Nxt Compass Sensor Tutorial

How To Use The Hitechnic Compass Sensor For Wro Soccer Soccer Sensor Being Used

Mccolganrobotics

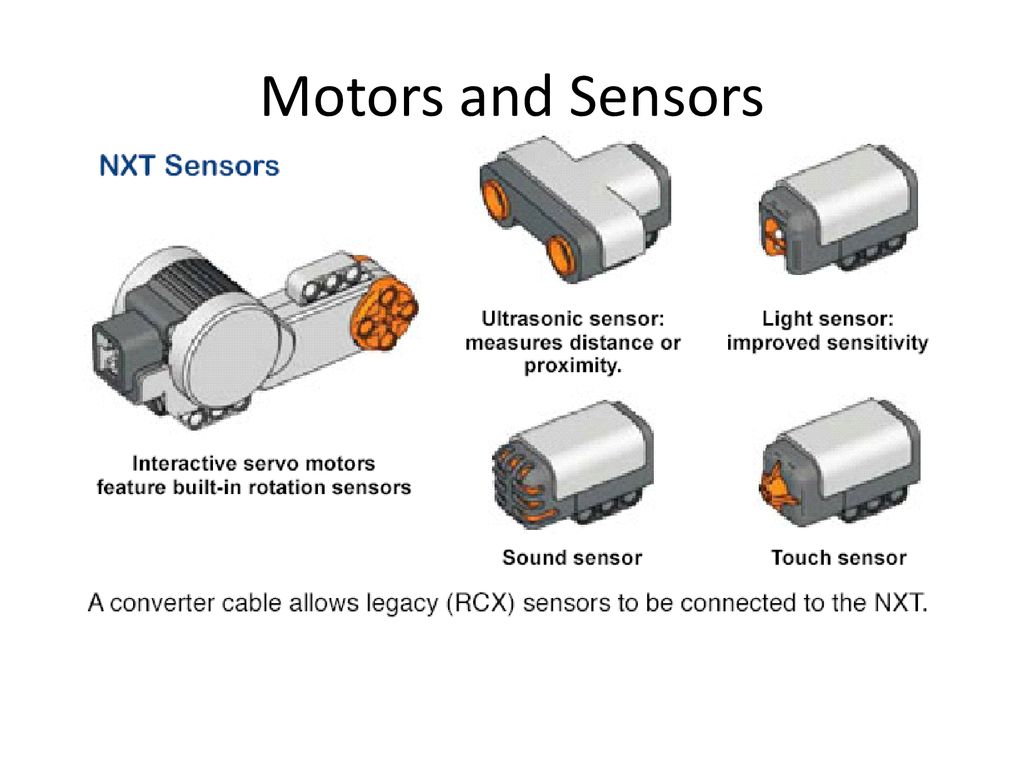
Nxt 2 0 8547 Lego Mindstorms Nxt 2 08547 Sensors 9843 Touch Sensor9843 9844 Light Sensor9844 9845 Sound Sen Lego Mindstorms Lego Mindstorms Nxt Lego Nxt

Free Lego Nxt Mindstorms Robotics Tutorial Hitechnic Compass And Robot Soccer Challenge 104

Compass Sensor For Lego Mindstorms Nxt Schematic Circuit Diagram

المدونة السادسة عشر حساس البوصلة Compass Sensor With Images Lego Mindstorms Lego Mindstorms Nxt Lego
The compass sensor connects to an nxt sensor port using a standard nxt wire and uses the digital i2c communications protocol.
Nxt compass sensor tutorial.

Dupond Cable Jumper Wire Female To 6pin Lego Ev3 For Micro Bit Microbit Robotbit Rcmall Micro Open Source Hardware Wire
Compass For Nxt Or Ev3

Lsm9ds1 Accelerometers Sensor Gyro

Lego Nxt Sensors Lego Mindstorms Nxt Lego Mindstorms Teaching Computers
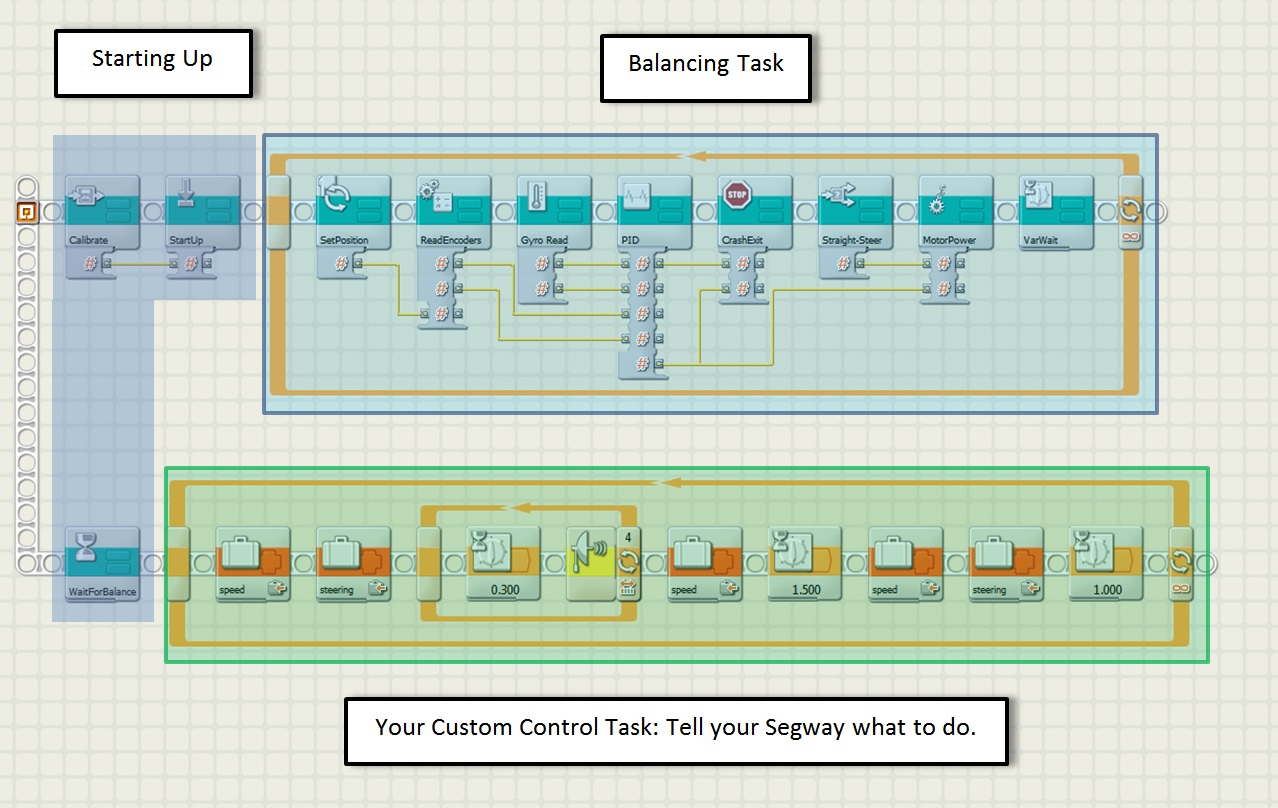
Lego Mindstorms And Nxt G Ppt Download

Magnetic Sensor Compatible With Lego Mindstorms Nxt Robotshop

Lego Mindstorms Ev3 Source Code Available Make Lego Mindstorms Nxt Lego Mindstorms Lego
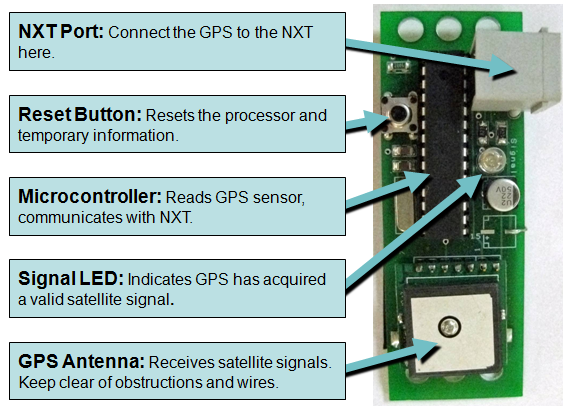
Dgps Dexter Industries

The Truth About The Ev3 Gyro Sensor Lego Mindstorms Lego Mindstorms Nxt Lego Robot

How To Use Rsx Old Mindstorm Software On Existing Computers Lego Mindstorms Lego First Lego League

Measure Rate Of Rotation Of Hitechnic Nxt Gyro Sensor Simulink

Using The Hitechnic Color Sensor V2 With Ev3 Youtube

Atmega328 Bootloader Programming Shield For Arduino Uno Arduino Projects Arduino Simple Arduino Projects

Imu For Lego Mindstorms An Accelerometer And Gyroscope Sensor For Lego Mindstorms Nxt Lego Mindstorms Lego Mindstorms Nxt Lego Machines

How To Use The Hitechnic Compass Sensor For Wro Soccer Soccer Sensor Being Used

Lsm9ds1 9 Dof Imu With Some Sample Arduino Code Dof Accelerometers Coding

Lego Inertial Motion Sensor Lego Mindstorms Nxt Ev3 Lego Mindstorms Nxt Lego Mindstorms Sensor
Hitechnic Sensor Ev3 Blocks Bot Bench
1

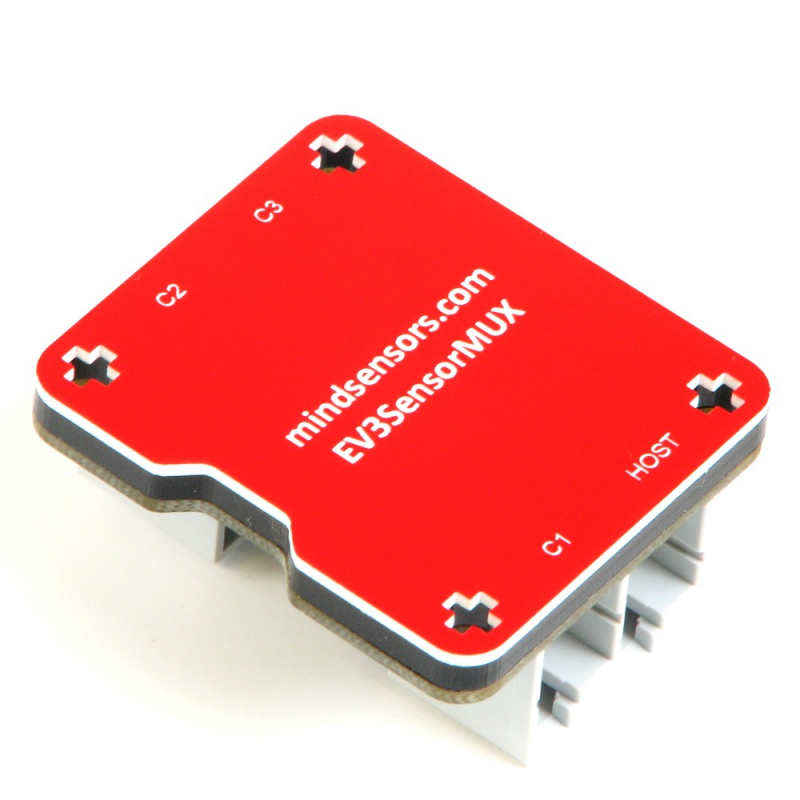
Design Lego Nxt Open Source Hardware Design
Nxt G Archives Dexter Industries

Lego Mindstorms Nxt Wikiwand

Dexter Dgps Gps Module Compatible With Lego Mindstorms Nxt Robotshop

Hitechnic Gyroscopic Sensor For Lego Mindstorms Nxt Gyro
Source : pinterest.com
